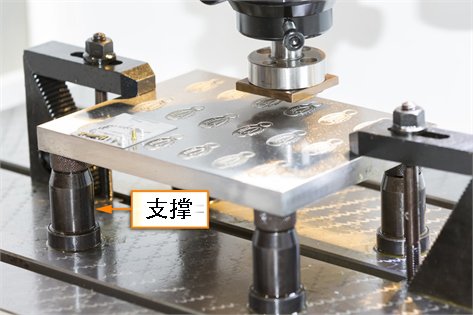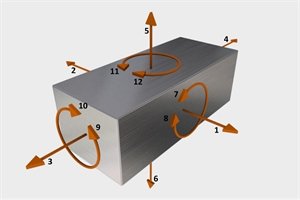
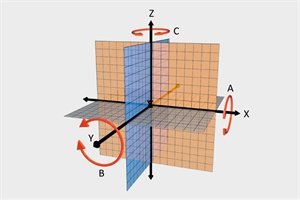
夹具设计的目标是保证工件在夹具上的正确定位,并在加工过程中限制工件的运动趋势。制造商使用三个垂直轴,X, Y, Z,从笛卡尔坐标系来描述一个工件的位置和运动。
该坐标系描述了工件可能沿着线性的X、Y、Z轴以及绕着转动的a、B、C轴(对应于12个自由度移动的可能方向,包括正方向和负方向。在垂直加工过程中,水平的X轴描述了从一边到另一边的运动,即1度和2度。水平的Y轴描述了向前和向后的运动,即3度和4度。纵Z轴表示上下运动,角度分别为5度和6度。六个旋转运动是顺时针和逆时针围绕三个旋转轴:A轴为7度和8度,B轴为9度和10度,C轴为11度和12度。
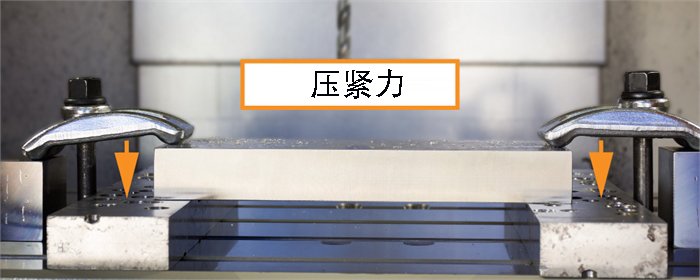
正确的工件夹具设置必须在加工前限制所有12个运动方向。支撑和定位装置最多可限制11个自由度,夹紧将限制最终的向上运动自由度。