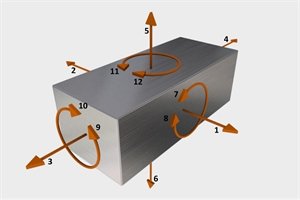
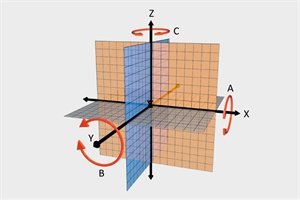
El objetivo del diseño de herramientas de sujeción es asegurar el posicionamiento correcto de la pieza de trabajo en la herramienta y restringir su movimiento durante el proceso de mecanizado. Los fabricantes utilizan un sistema de coordenadas cartesianas con tres ejes perpendiculares: X, Y y Z, para describir la posición y el movimiento de una pieza de trabajo.
Este sistema de coordenadas describe los posibles movimientos lineales a lo largo de los ejes X, Y y Z, así como los movimientos de rotación alrededor de los ejes A, B y C (correspondientes a 12 direcciones posibles de movimiento, incluyendo direcciones positivas y negativas). En procesos de mecanizado vertical, el eje X horizontal describe el movimiento de un lado a otro, denominado como 1 grado y 2 grados. El eje Y horizontal describe los movimientos hacia adelante y hacia atrás, denominados como 3 grados y 4 grados. El eje Z vertical representa los movimientos hacia arriba y hacia abajo, denominados como 5 grados y 6 grados. Los seis movimientos de rotación son rotaciones en sentido horario y antihorario alrededor de los tres ejes de rotación: el eje A a 7 grados y 8 grados, el eje B a 9 grados y 10 grados, y el eje C a 11 grados y 12 grados.
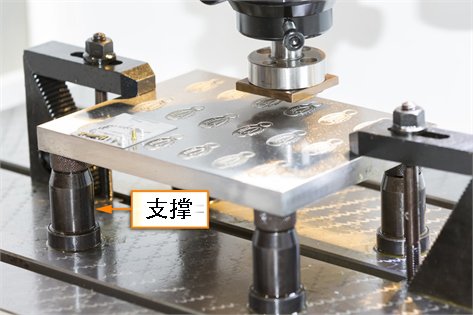
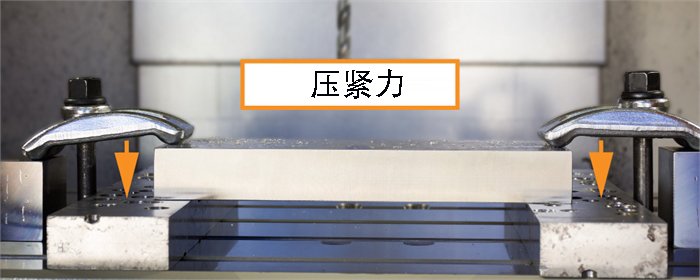
Una configuración adecuada del dispositivo de sujeción de la pieza de trabajo debe limitar todos los 12 movimientos antes de comenzar el mecanizado. Los dispositivos de soporte y posicionamiento pueden restringir hasta 11 grados de libertad, mientras que el proceso de sujeción limitará el último grado de libertad en el movimiento hacia arriba.